
临床一线
临床案例|重医附一院泌尿外科团队应用敏捷机器人完成高难度腹膜后肿瘤与嗜铬细胞瘤切除术
近日,重庆医科大学附属第一医院(以下简称“重医附一院”)泌尿外科王德林教授团队应用敏捷AGIBOT腔镜手术机器人(以下简称“敏捷机器人”),连续完成多台高难度手术。其中,一例长径21cm巨大腹膜后肿瘤切除术和一例高危嗜铬细胞瘤切除术的顺利实施,为敏捷机器人在复杂解剖空间下的临床应用积累了新的实践经验。
挑战极限空间:21cm巨大肿瘤的精准剥离
4月下旬,重医附一院泌尿外科接诊一名77岁男性患者,经完善影像学检查、术前风险评估与围手术期准备后,于4月29日实施手术。术前影像学显示,患者左侧腹膜后存在一个大小约14.8×10.1×18.1cm的巨大肿块,术后实测最大径约21cm。
此类手术的挑战在于"空间挤压"与"解剖变异"。巨大瘤体已导致左肾、腹主动脉严重移位,并向前推挤腹膜造成脾脏移位;瘤体供血来源复杂,涉及左肾动脉、腹主动脉及腰动脉分支。为降低术中出血风险,王德林主任团队在术前3D重建基础上,为患者实施数字减影血管造影(DSA)检查,明确肿瘤供血动脉后完成来自肾动脉和左侧髂外动脉的靶血管栓塞。
术中,王德林教授操作敏捷机器人,利用4K 3D超清视野对受压变形的血管进行精准辨识。尽管巨大肿瘤限制了器械的活动半径,但系统凭借7自由度末端器械的灵活性,在狭小的间隙中完成肿瘤周边游离与血管结扎,并完整切除肿瘤。手术历时约4小时,术中出血量较少,患者术后平稳返回病房。尽管巨大肿瘤限制了器械的活动半径,但系统凭借7自由度末端器械的灵活性,在狭小的间隙中完成肿瘤周边游离与血管结扎,并完整切除肿瘤。手术历时约4小时,术中出血量较少,患者术后平稳返回病房。
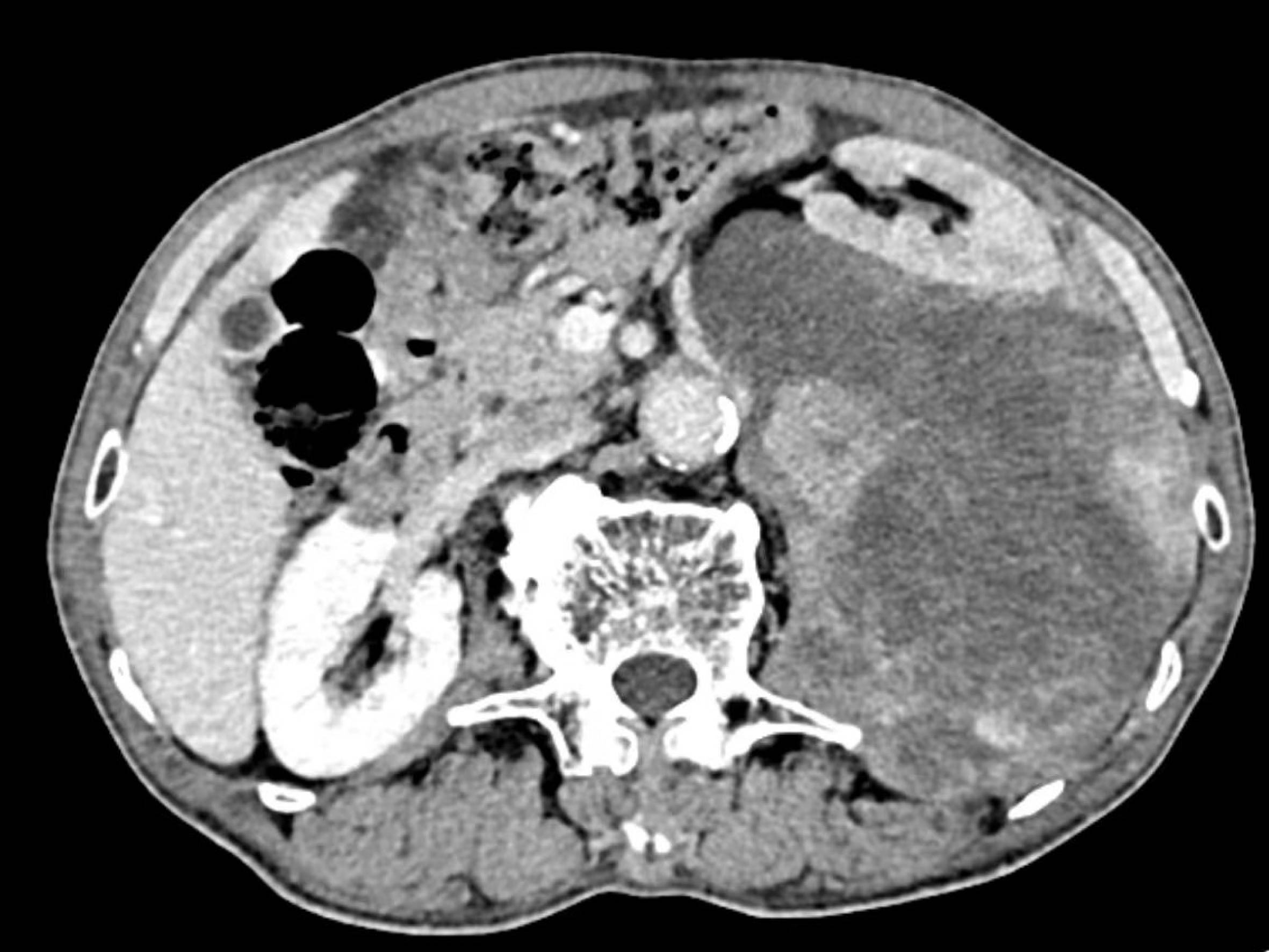
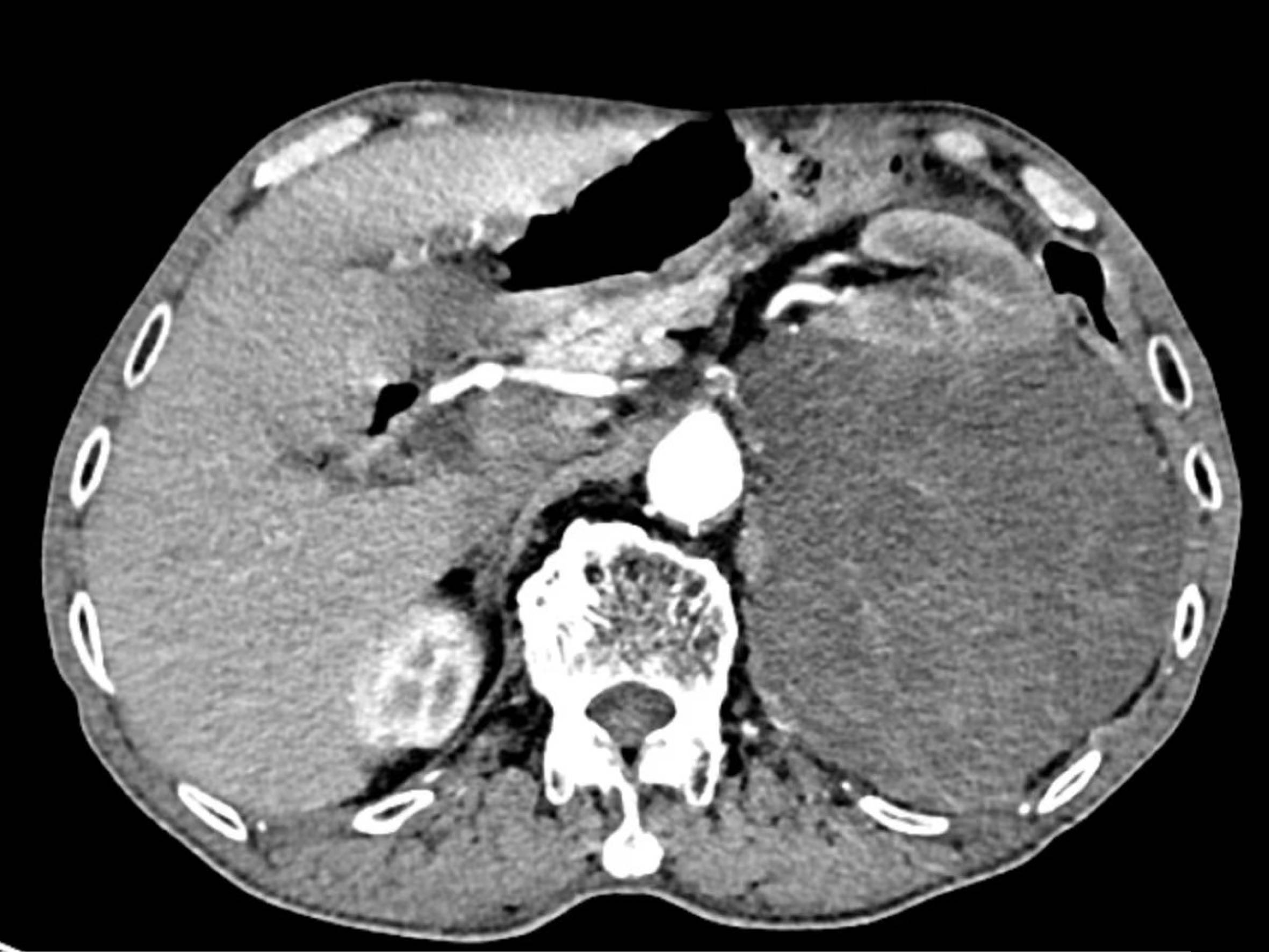

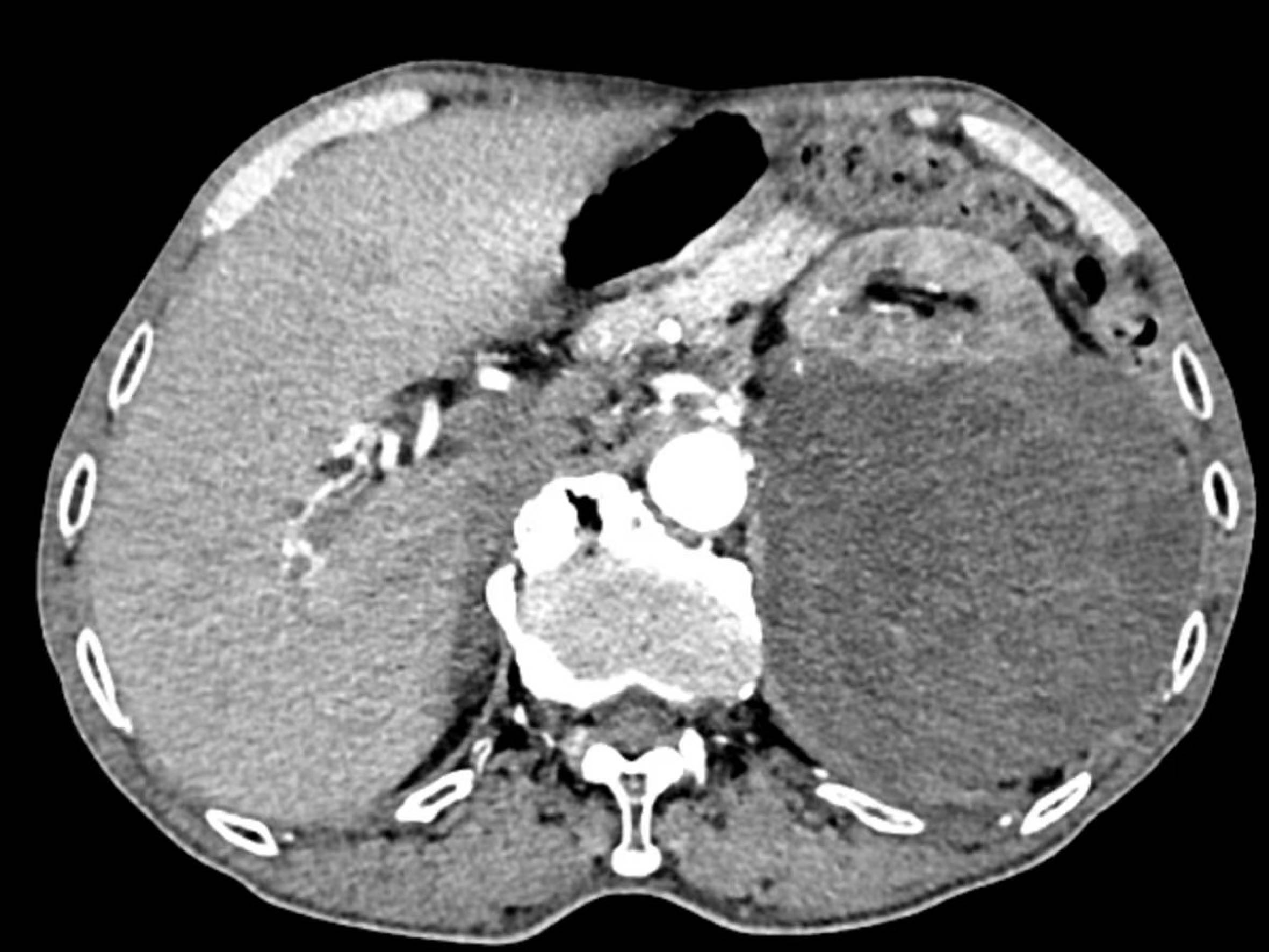
术前CT扫描肿瘤形态与位置
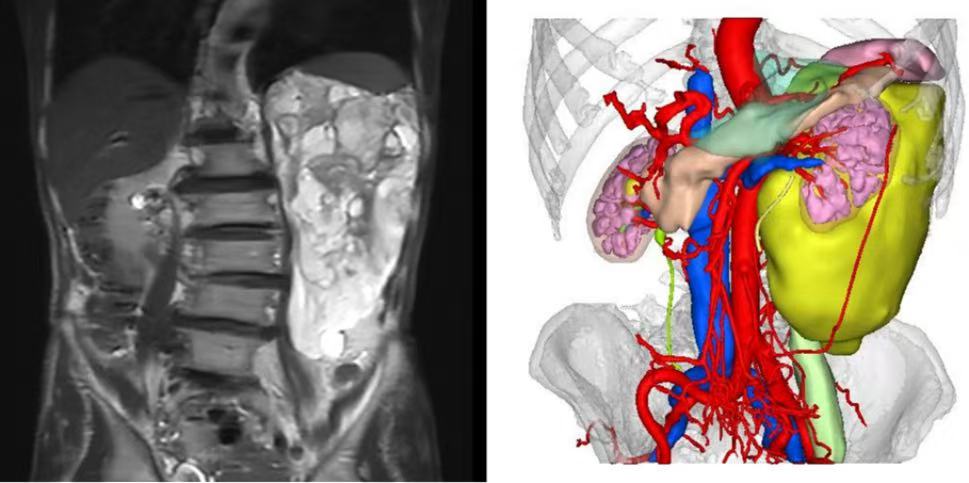
术前MRI及3D建模腹膜后肿瘤情况
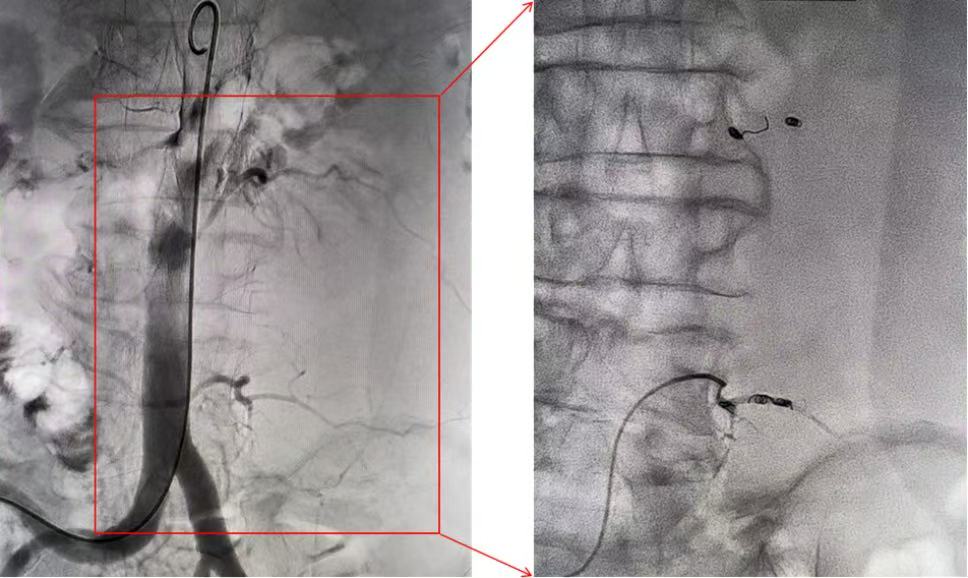
术前DSA肿瘤供血动脉栓塞
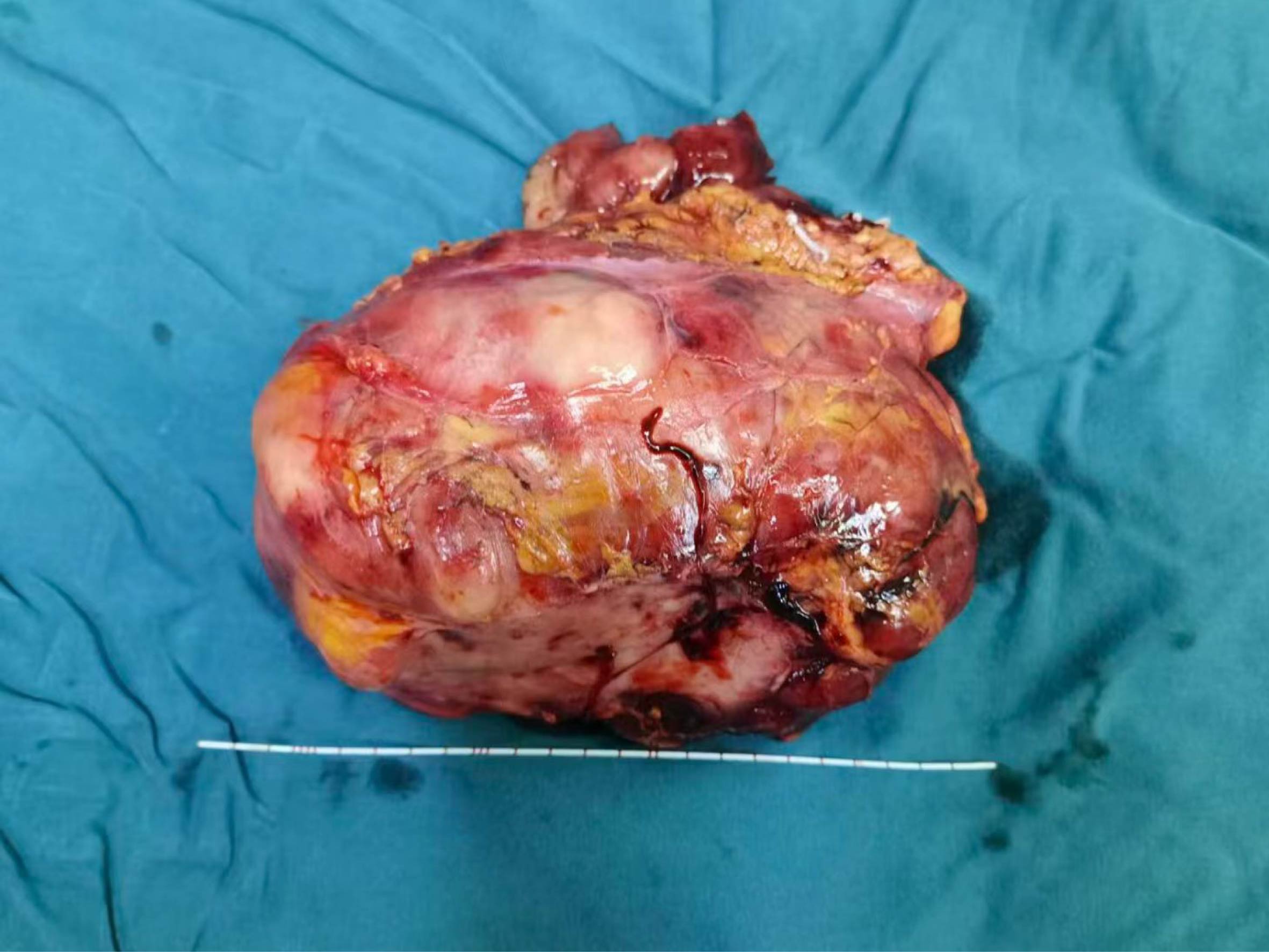
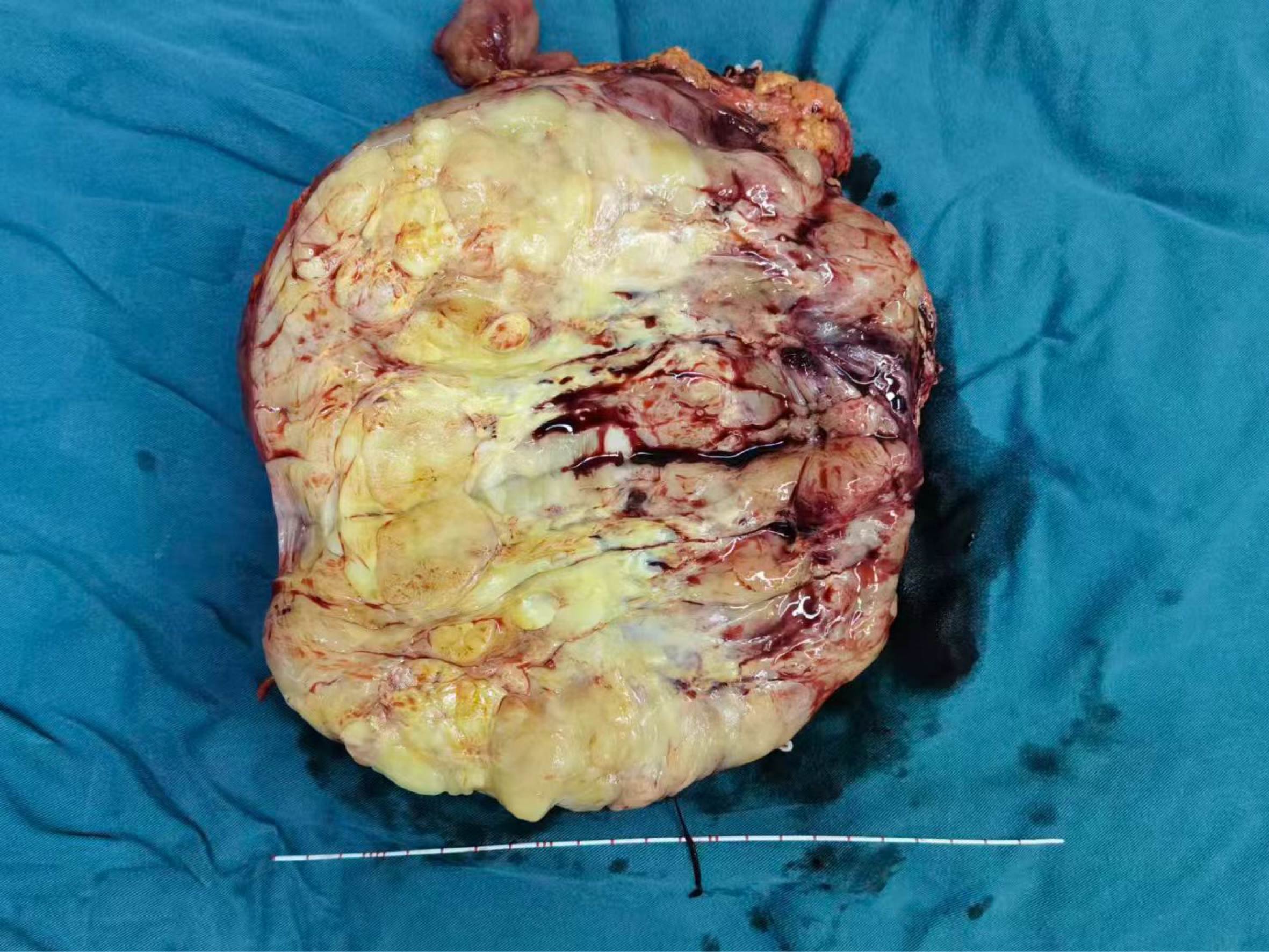
术后完成切除的肿瘤标本
在“激素炸弹”旁精准操作:极低颤动下的平稳剥离
如果说巨大肿瘤考验的是机器人在狭小空间中的操作能力,那么同日完成的另一台经腰入路嗜铬细胞瘤切除术,则对敏捷机器人在生理波动环境下的操控精度提出了更高要求。
患者左侧肾上腺区生长一枚8.5cm的嗜铬细胞瘤。这类肿瘤被称为腹腔内的"激素炸弹"——术中对瘤体的任何挤压都可能诱发瘤体儿茶酚胺大量入血,导致血压骤升,引发心脑血管意外。该患者同时合并有心包中量积液及双侧胸腔积液,还有肾病综合征及尿毒症,心肺代偿能力极弱,对术中操作的血液循环平稳性要求极高。
“在这种情况下,手术不仅要精准,更要轻要稳。”王德林教授
在敏捷机器人的辅助下,借助主从操控系统的滤颤功能,王德林教授在肿瘤包膜外精细剥离、处理周边血管时,实现了对瘤体的最小程度牵拉与挤压,有助于减少术中激素释放。
术中监测显示:肿瘤游离及切除过程中,患者循环系统波动幅度维持在临床安全范围内,未出现高血压危象等循环剧烈波动。

王德林教授团队术中照片
临床视角:操控体验与技术特点
对于资深手术机器人专家而言,设备的性能直接体现于“主从联动”的操作质感上。完成多台复杂手术后,王德林教授从以下几个维度分享了对敏捷机器人的使用体会:
· 实时性与跟手感:系统主从响应延迟低,术者手部动作可即时转化为器械末端的精准位移,这种“无感延迟”体验是处理血管密集区域的重要保障。
· 视野稳定性:4K超清三维成像提供了良好的空间纵深感,且在操作过程中画面保持稳定。
· 临床部署效率:敏捷机器人患者平台的紧凑设计和可视化引导功能,有助于缩短术前准备时间,降低手术室团队的协作门槛。


王德林教授操作敏捷机器人
以临床实证推动国产机器人进阶
重医附一院泌尿外科开展的敏捷机器人辅助手术,涵盖从常规肾囊肿去顶减压术到高难度复杂肿瘤切除术等多种类型。在连续的临床实践中,敏捷机器人在真实手术场景下展现出令人满意的操作适应性和学习曲线。
未来,敏捷将继续与国内医学中心广泛合作,通过更多临床实践的积累,持续优化临床应用表现,持续拓宽临床应用场景。
2026.05.05