
敏捷动态
敏捷助力浙江省肿瘤医院完成10cm肾肿瘤机器人辅助保肾手术
在高难度泌尿外科手术中,如何在完整切除瘤体的同时控制创伤与出血风险,是临床关注的重点之一。
2026年3月,浙江省肿瘤医院泌尿外科陈锦超教授团队,借助AGIBOT敏捷腔镜手术机器人,完成了一例经腹入路的复杂肾肿瘤切除术。该病例因肿瘤体积大、血供复杂,对术中操作提出了较高要求。
病例背景
该例患者为青年男性,因右肾占位入院。术前影像学检查显示,肿瘤直径约10厘米,局部血供丰富,已侵占大部分肾实质,肾动静脉分支众多,解剖关系复杂,属于高难度病例。传统开放手术创伤较大、术后恢复周期长;常规腹腔镜手术受限于操作自由度和视野,处理此类肿瘤亦面临挑战。为在保障手术安全的同时尽可能保留患侧肾功能,陈锦超教授团队经充分评估讨论,决定采用机器人辅助经腹腔入路进行手术。
"这类肿瘤的关键在于血管处理、切缘缝合和操作精准,术中每一步都对机器人的控制精度和安全响应有较高要求。"陈锦超教授表示。
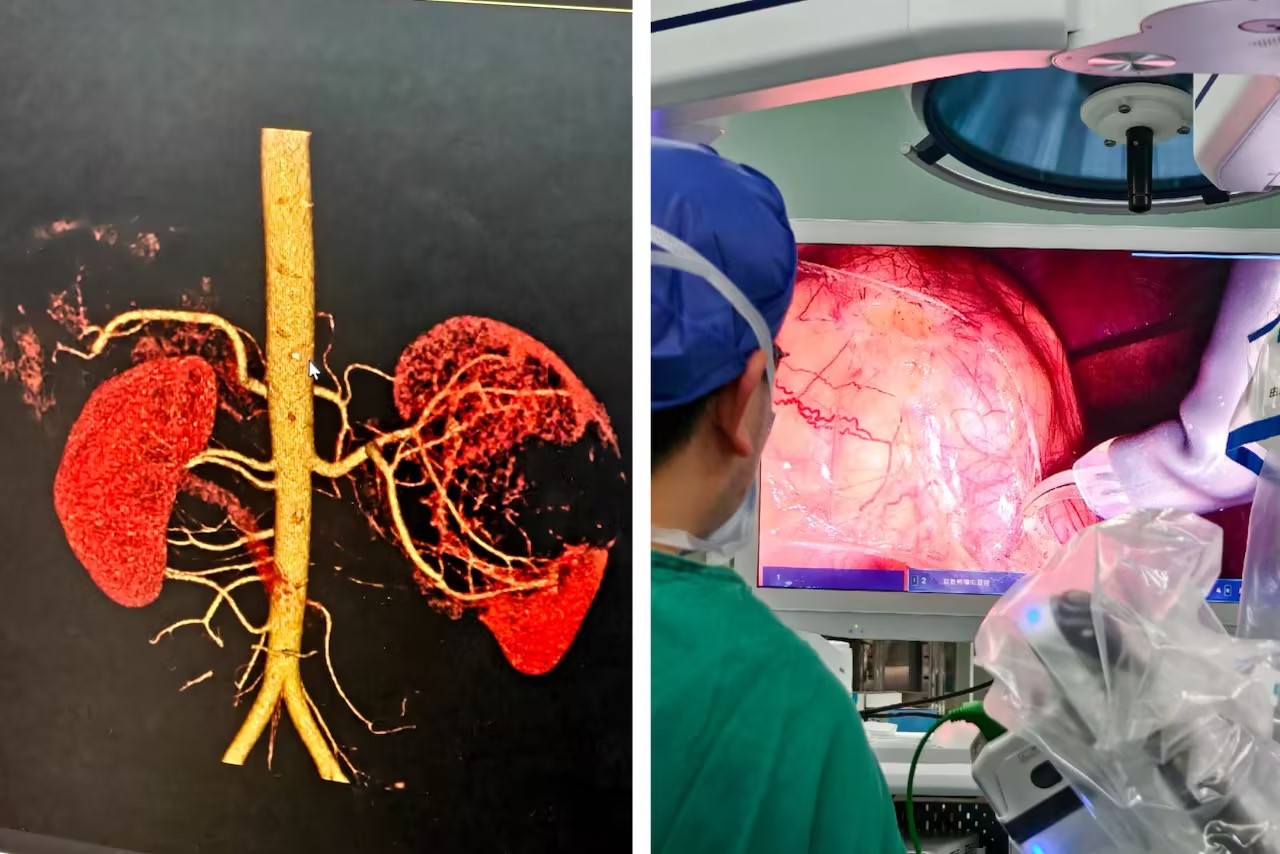
术前CT三维重建图像及术中内窥镜所见肿瘤局部
手术过程
面对这颗直径近10厘米的巨大肾肿瘤,完整、安全地切除是主要挑战。相比于传统腹腔镜手术,敏捷机器人具有4K 3D超清视野、操作器械灵活、震颤过滤等特点,能够在狭小空间内进行较精细的解剖与血管处理。
在敏捷机器人的超清放大视野下,陈锦超教授对血管逐一识别、处理,在保障视野清晰的前提下完成术野控血,为后续切除奠定基础。在高自由度机械臂与颤动过滤的支持下,系统将医生手部运动转换为机械臂末端精准稳定的运动。在狭窄空间内沿肿瘤边界切除病灶及部分邻近肾组织,实现了肿瘤的完整移除。在残肾保留和创面处理阶段,陈锦超教授借助多自由度主控制臂,控制进针角度、深度与张力,对腹膜后组织及血管残端进行缝合,缝合过程稳定。
手术过程顺利,主刀操作历时约2.5小时,患者术后恢复平稳。
陈锦超教授术后表示,敏捷机器人的画面清晰度满足深部操作需求,器械剪切力表现可靠,整体使用体验媲美进口同类产品。

手术团队术中照片

术后标本
系统部署效率
除手术本身外,本次操作中系统部署效率也值得关注。
从设备对接至完成术前准备,全程用时不到6分钟,体现了系统在实际手术场景中的部署能力。敏捷机器人在系统部署层面进行了针对性设计。患者手术平台搭载力感知模块与双电机驱动,单人单手施力不超过25N即可移动到位;采用摄像头与激光双引导定位系统,结合一键无菌部署功能,将装机流程标准化、简单化,有助于缩短术前准备时间。手术臂智慧屏支持器械使用次数直观显示;位置记忆功能确保更换器械后可快速复位,保障手术节奏。

AGIBOT敏捷腔镜手术机器人
对于复杂肿瘤手术而言,设备本身并不能替代医生经验,但可以在关键环节提供支持。这例10cm巨大肾肿瘤的保肾手术,是一次高挑战的临床实践,也为敏捷机器人在复杂泌尿外科手术中的应用提供了参考。
2026.04.05